Problem
Design a low cost, lightweight electronic travel aids?

Among the 25.2 million people in U.S. who is suffering from sight loss, only 19,500 were users of ETAs (Electronic Travel Aids). The reason for its failure gains from its relatively high price, heavy weight and lifestyle incompatibilities.
Moreover, despite the functionality that the white canes provide, the blind people are just avoiding obstacles in the space most of the time. They did not really know what is around them until they actually touched the objects with the canes.
Proposed solution
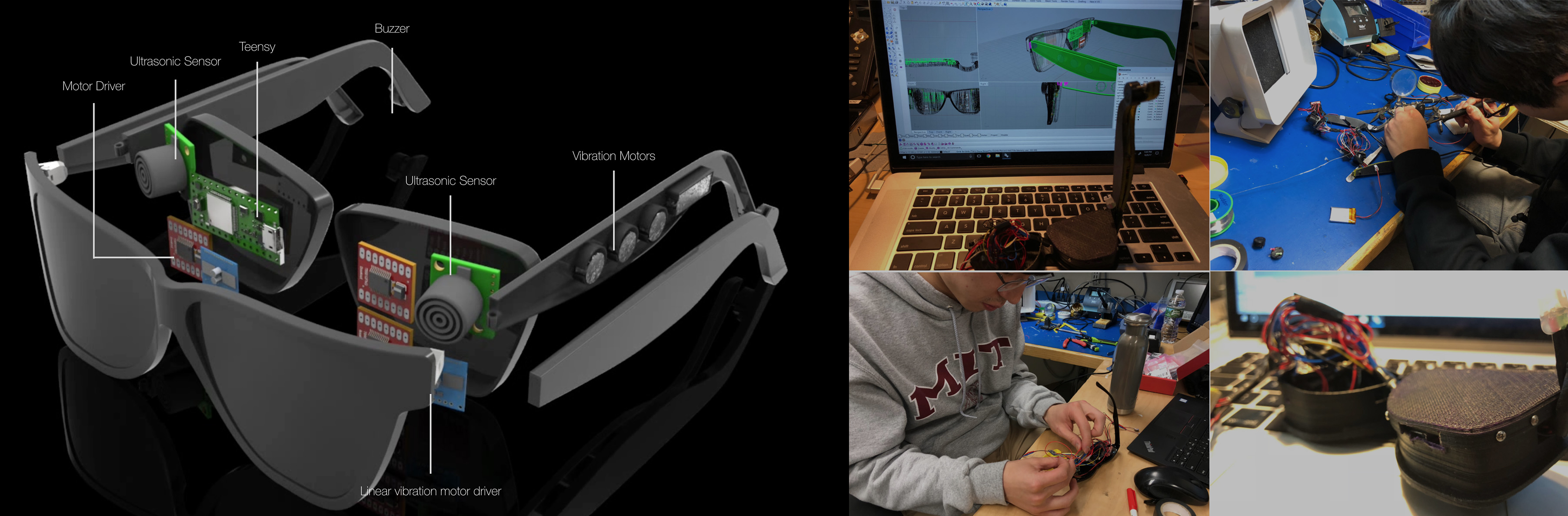
Using vibration pattern as a platform to understand the environment
The Third Eye enables users to interpret spatial environment three dimensionally, helping them to understand the surroundings without touching the obstacles. It detects not only the objects on the ground but also hovering obstacles as well.
Moving forward
The Third Eye enables users to interpret spatial environment three dimensionally, helping them to understand the surroundings without touching the obstacles. It detects not only the objects on the ground but also hovering obstacles as well.
Obstacle detected
Take the street sign for example. When the user move closer to the sign, the pattern goes from front to the back. So it feels like someone’s dragging the user from that back, signaling that there’s an obstacle in front of them, maybe they should step back a little bit.
Moving closer
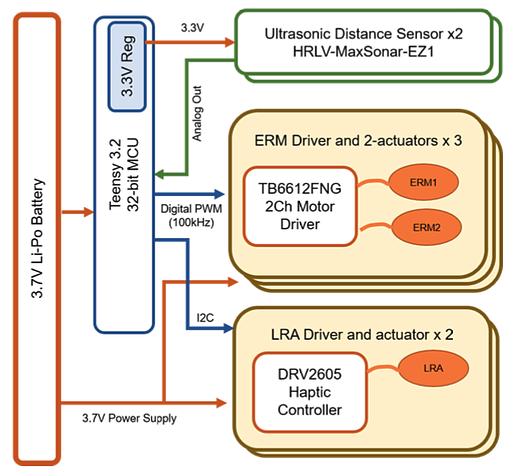
As the user is getting closer and closer to the obstacle, the frequency and intensity of vibration changes as well. There are three different frequencies that we designed. The longest distance is 2 meters, and the shortest distance is 30 centemeters.
3D scan the environment
The user could also use the glasses to scan around the environment. In this video based on the vibration pattern from the glasses. The users know there are all obstacles around them, which means they might have walked into a dead end alley.
Multi sensing
The two ultrasonic sensors on the glasses could work separately. In this video when the users go up to the stairs, they know there is nothing in front of them. But when they scan around the space (based on the distance), they could feel there’s something at their left, which leads them to the door. So it gives the users a basic sense and understanding of how this structure and environment could be like.